As senior year at Williams College nears its conclusion, students are offered a unique and exciting opportunity to leave their legacy through the Senior Year Experience (SYE). The Makerspace and Fabrication Lab are collaborating with the SYE to offer seniors opportunities to channel their creativity and bring their most ambitious ideas to life.
 Whether it’s working on a meaningful piece of art, designing an innovative product, or building something entirely out of the box, the SYE provides access to cutting-edge tools like 3D printers, laser cutters, woodworking equipment, and more. But it’s not just about the tools students are guided by experienced staff who are passionate about turning ideas into tangible results.
Whether it’s working on a meaningful piece of art, designing an innovative product, or building something entirely out of the box, the SYE provides access to cutting-edge tools like 3D printers, laser cutters, woodworking equipment, and more. But it’s not just about the tools students are guided by experienced staff who are passionate about turning ideas into tangible results.
The SYE encourages seniors to think big, experiment boldly, and create something that truly reflects their passions and journey at Williams. It’s not just a project; it’s a chance to showcase innovation, dedication, and individuality as they prepare to step into the next chapter of their lives.
What is the Senior Year Experience?
The Senior Year Experience (SYE) is an exciting opportunity for seniors to dive into extracurricular projects that reflect their passions and aspirations. Whether you’re envisioning a sustainable 3D printing solution, designing intricate textiles, or building innovative prototypes with Raspberry Pi, the SYE provides the perfect platform to bring your ideas to life. The possibilities are as vast as your imagination.
What sets this program apart is its access to an incredible network of resources, including the Makerspace, Fabrication Lab, and perhaps even parts of the interdisciplinary MakersWeb. These spaces foster collaboration and creativity, connecting students with over 20 unique workspaces across campus. It’s not just about the tools; it’s about the vibrant community of creators who inspire and support one another.
Students have the freedom to explore a wide range of mediums, such as:
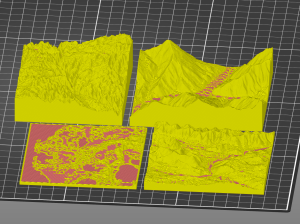
- 3D Printing and Scanning: Create intricate designs or explore sustainable printing solutions.
- Laser Cutting and Engraving: Add precision and detail to your projects with state-of-the-art technology.
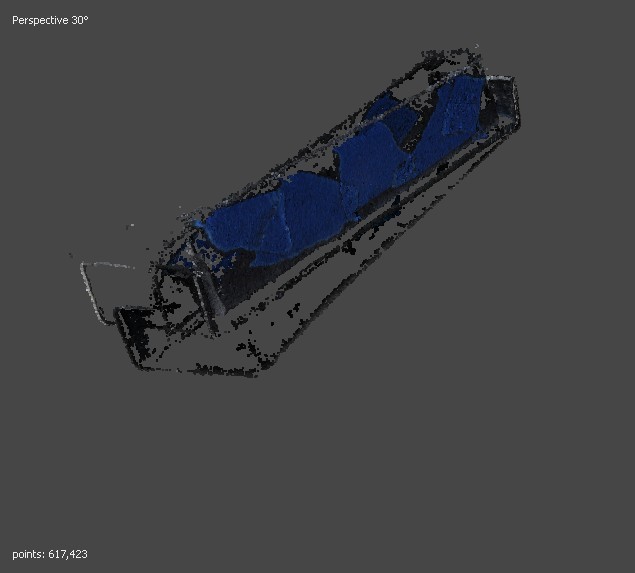
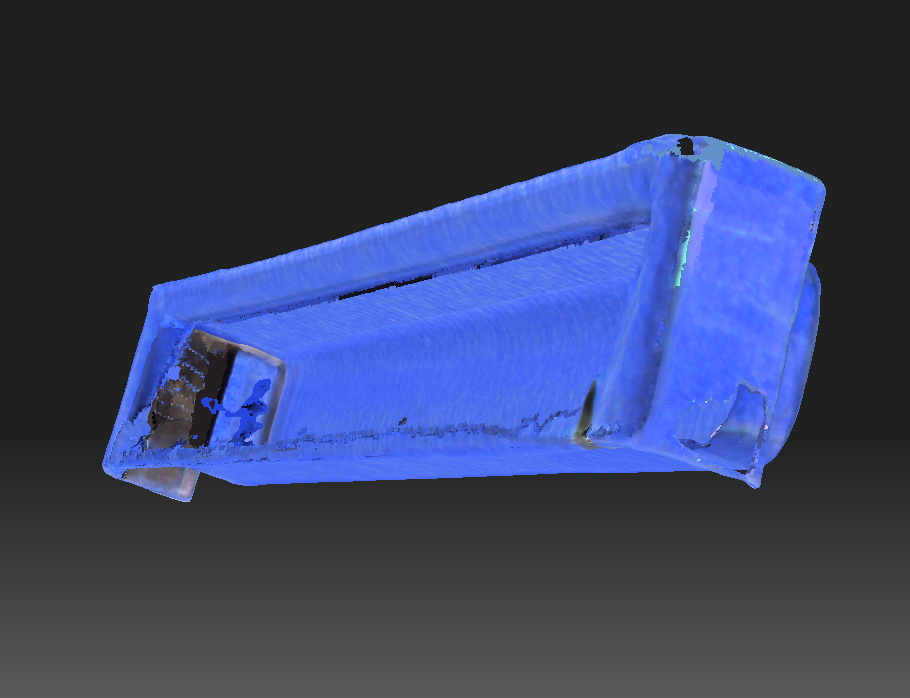
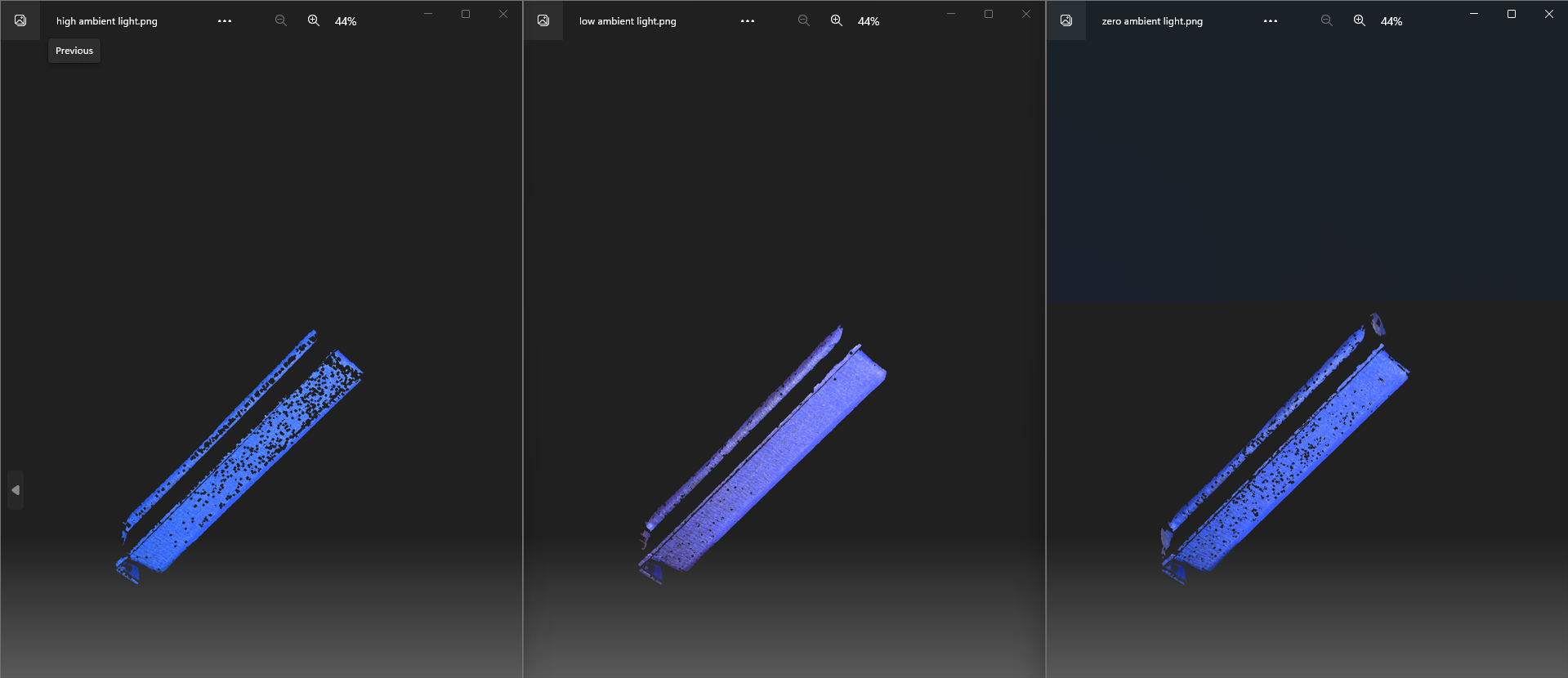
- Photogrammetry and Mold Making: Transform objects into digital models or design complex molds.
- Fiber Arts: Try your hand at quilting, sewing, crocheting, or even experimenting with mixed textiles.
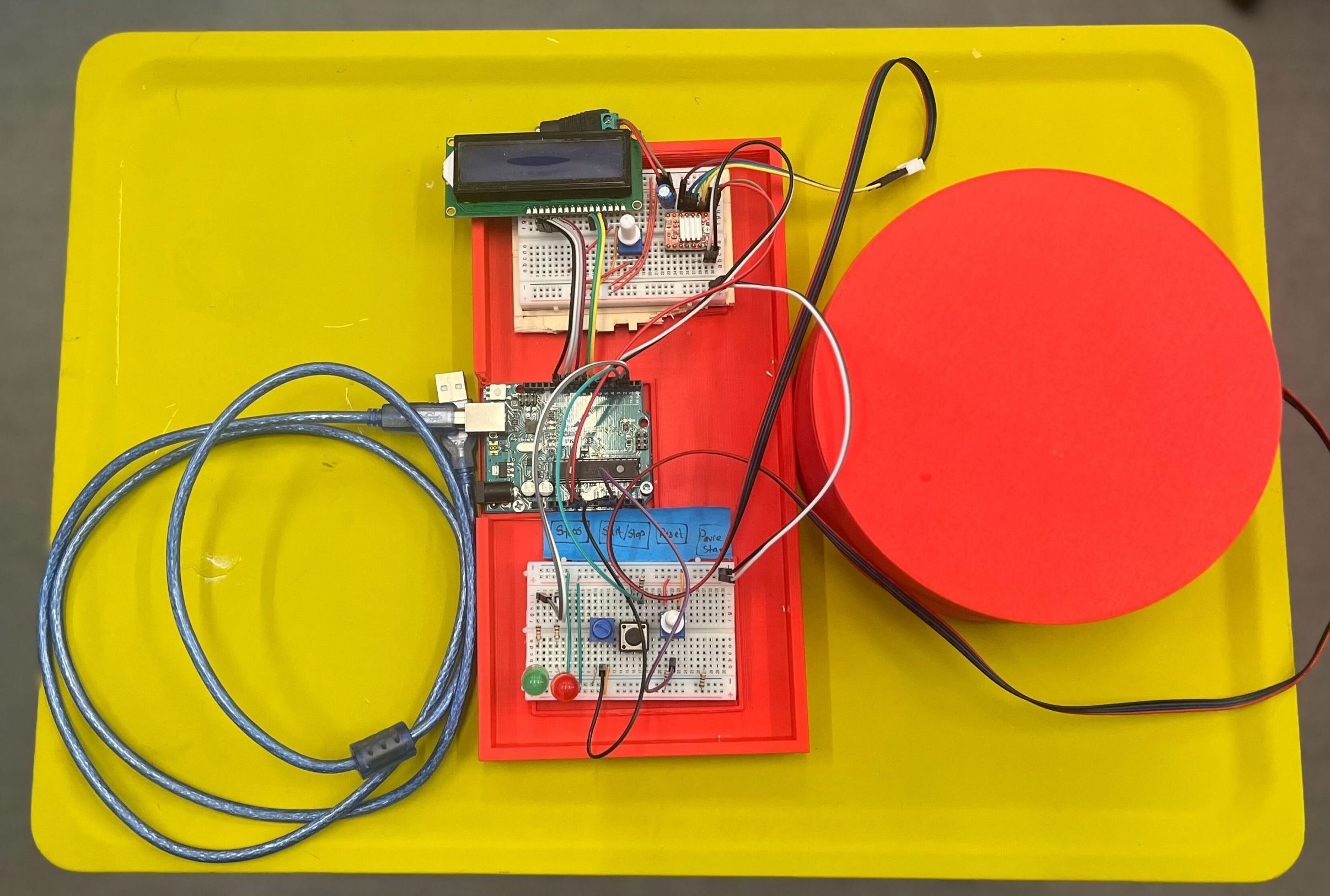
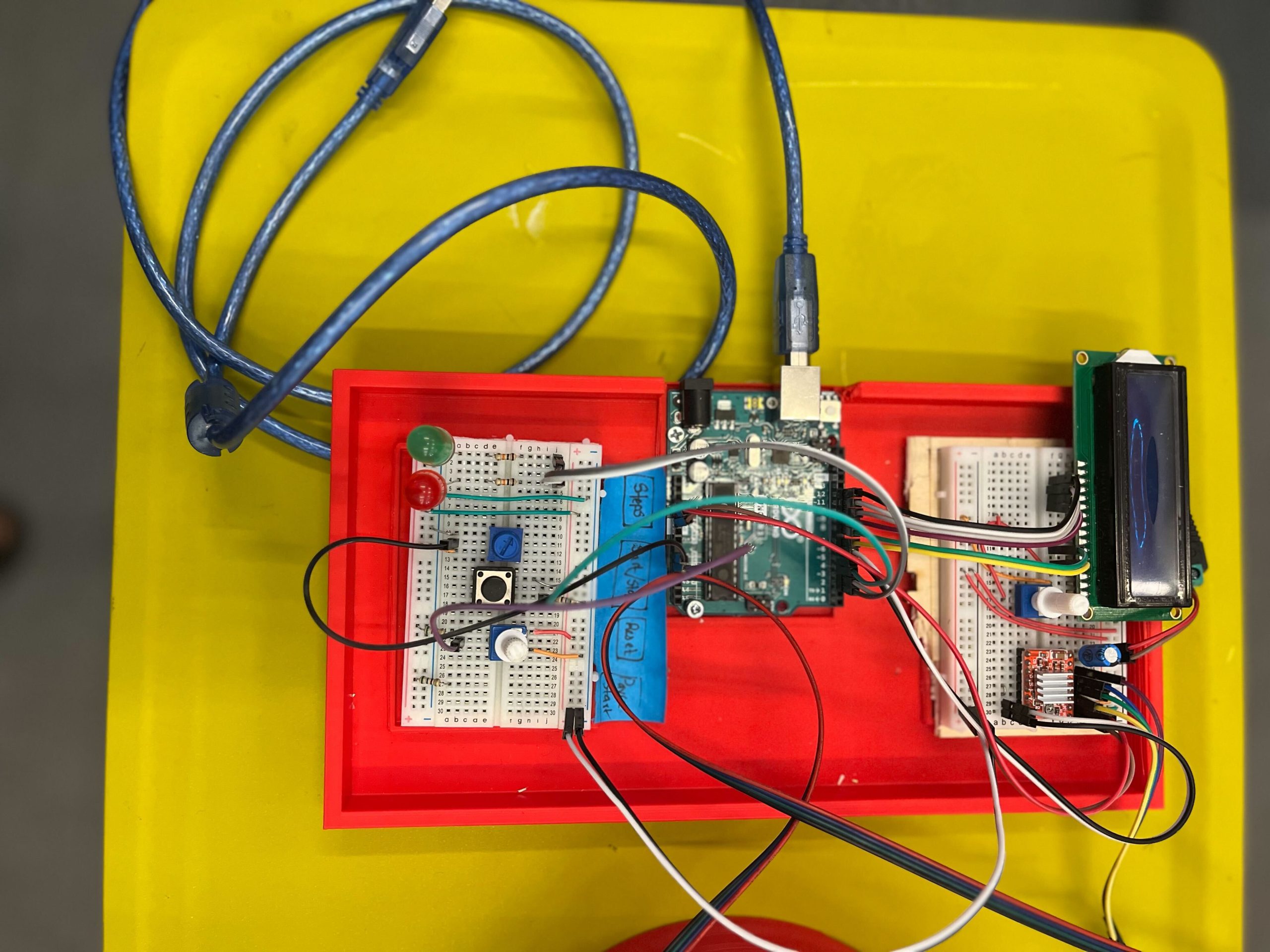
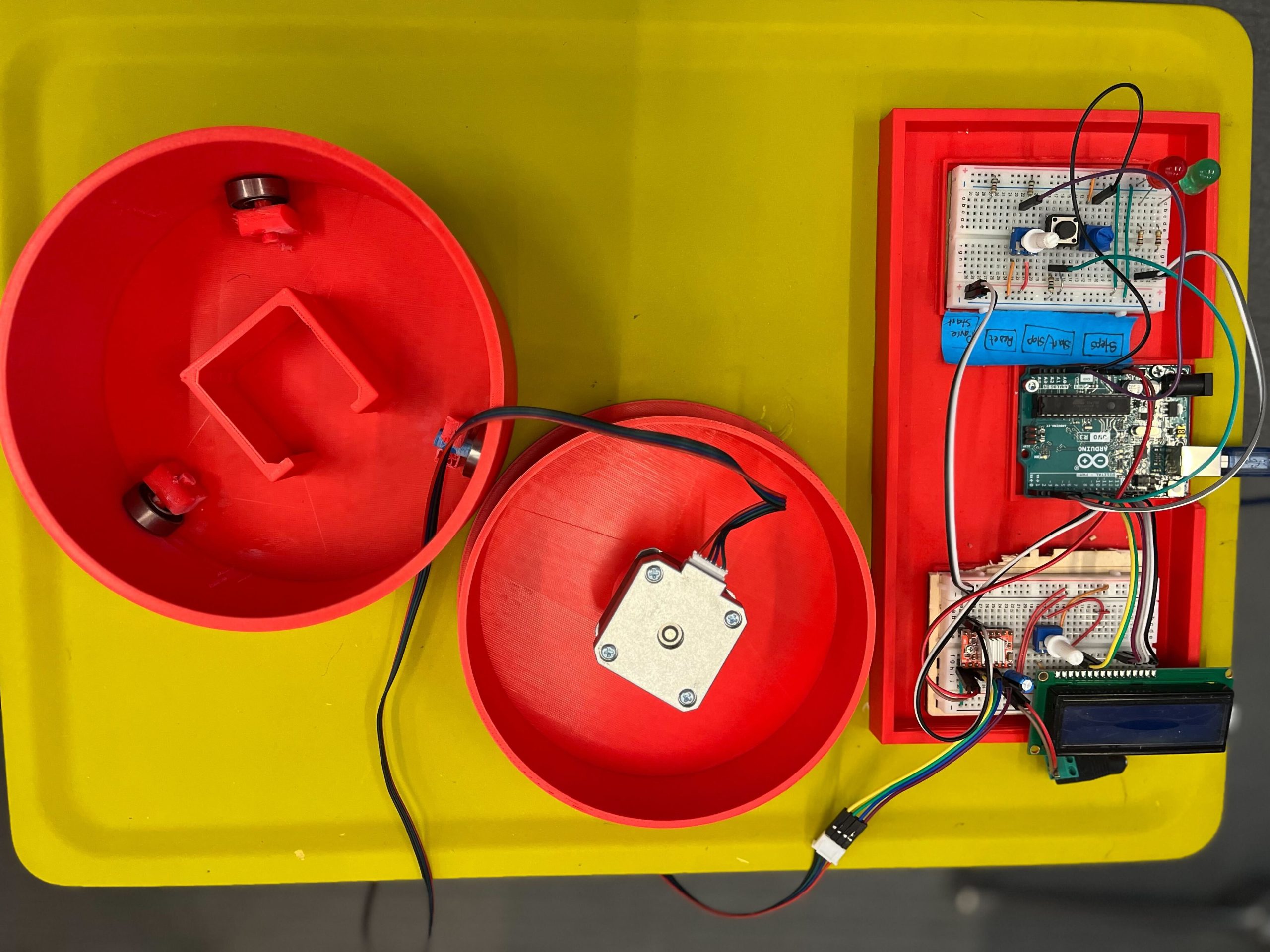
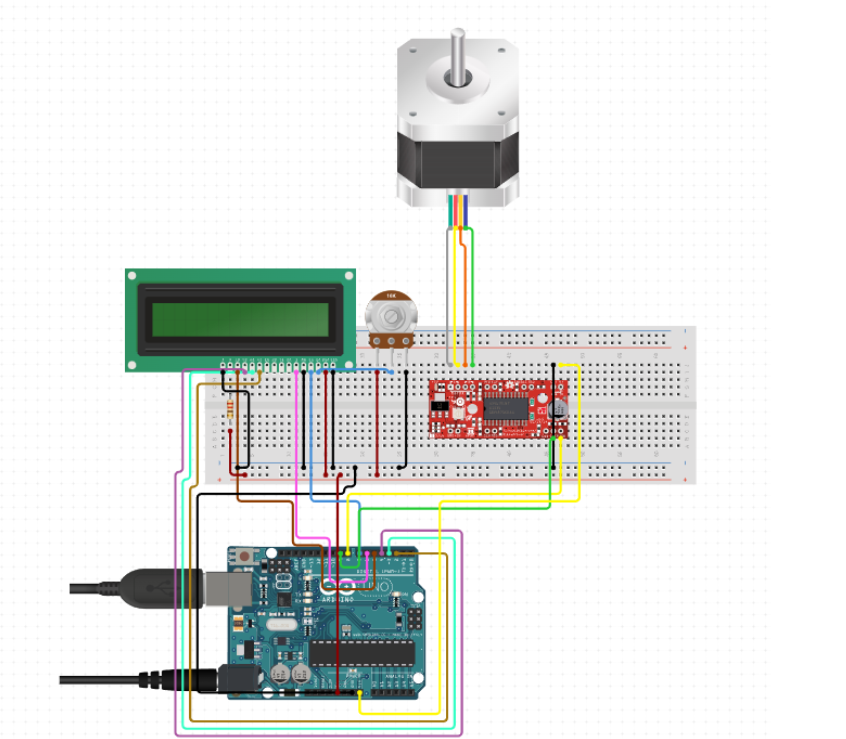
- Microprocessor Prototyping: Build interactive devices using Arduino or Raspberry Pi.
- Woodworking and Cricut Cutting: Craft furniture, decor, or intricate designs with these versatile tools.
The Application Process: Turning Ideas into Reality
Getting started with the Senior Year Experience (SYE) is as straightforward as sharing your vision. The process is designed to be simple yet impactful, ensuring that every participant has the opportunity to fully explore their creativity. Here’s how it works:
1. Submit Your Idea
The journey begins with an email. Reach out to David Keiser-Clark, the Makerspace Program Manager, to pitch your project idea. Don’t worry if it’s still in the brainstorming stage. This is your chance to outline your vision, explain your goals, and share what excites you about your project. Whether it’s a sustainable solution, an artistic masterpiece, or a tech-driven innovation, the SYE is all about giving life to bold and unique ideas.
2. Collaborate and Create
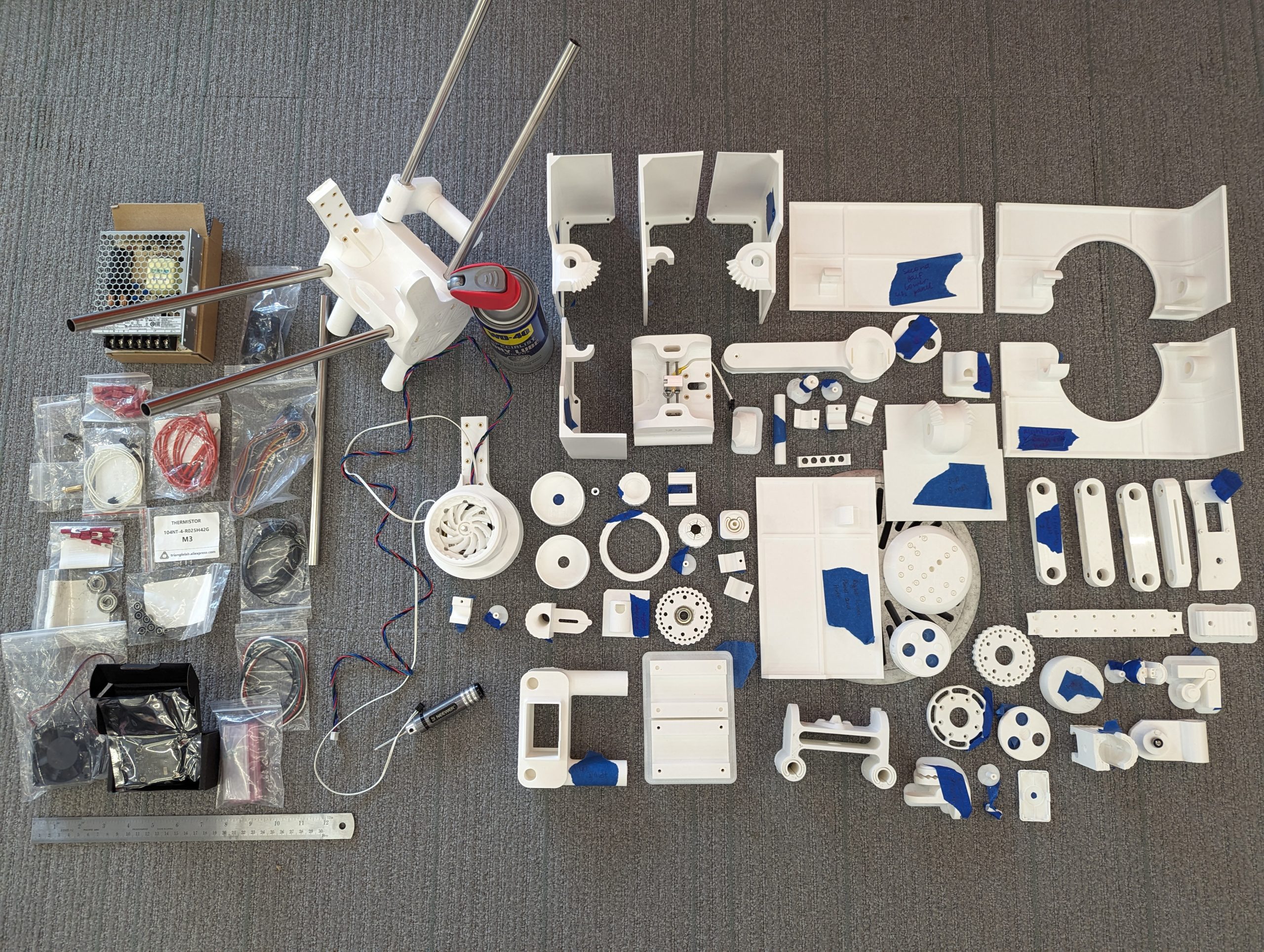
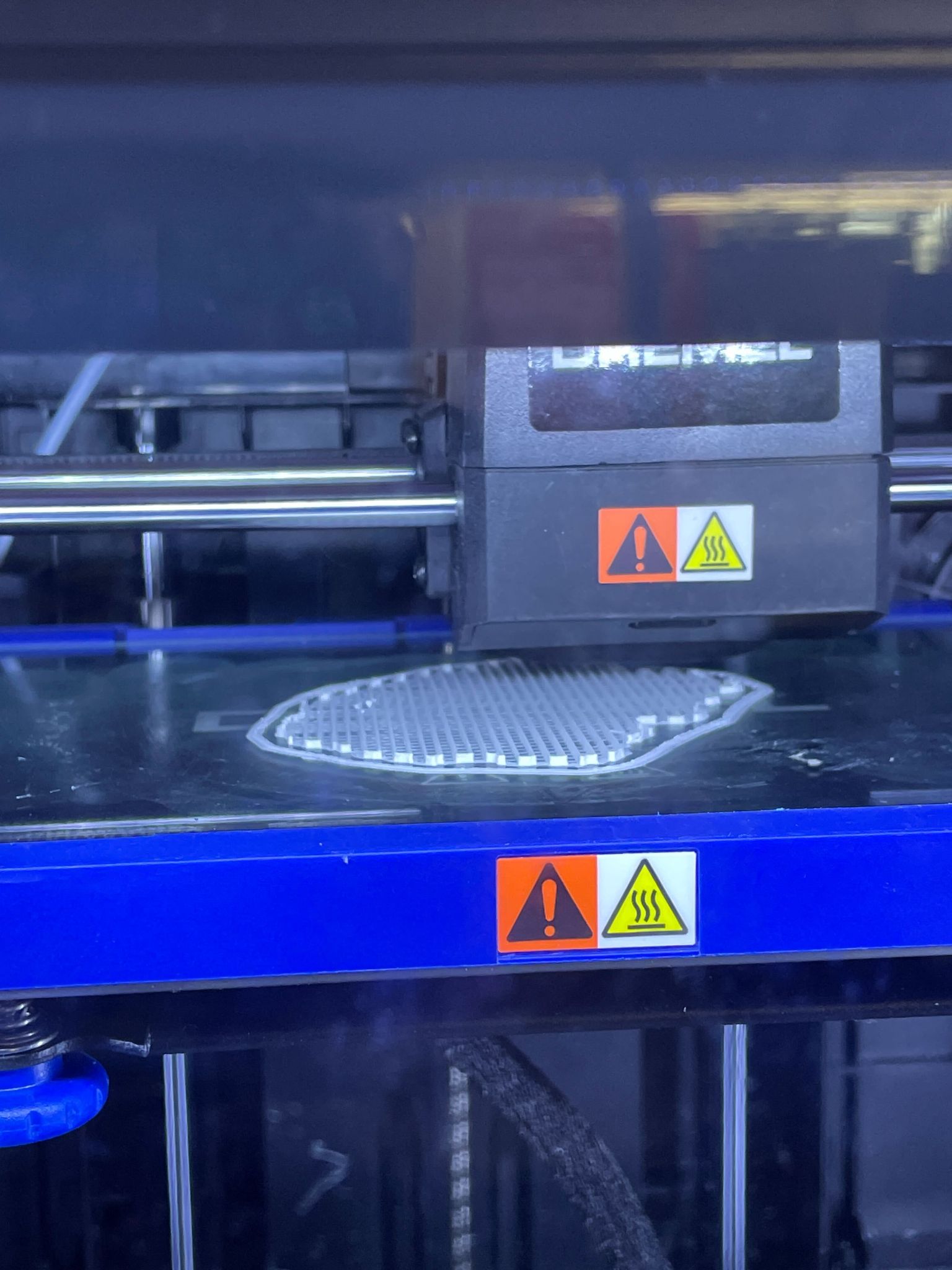
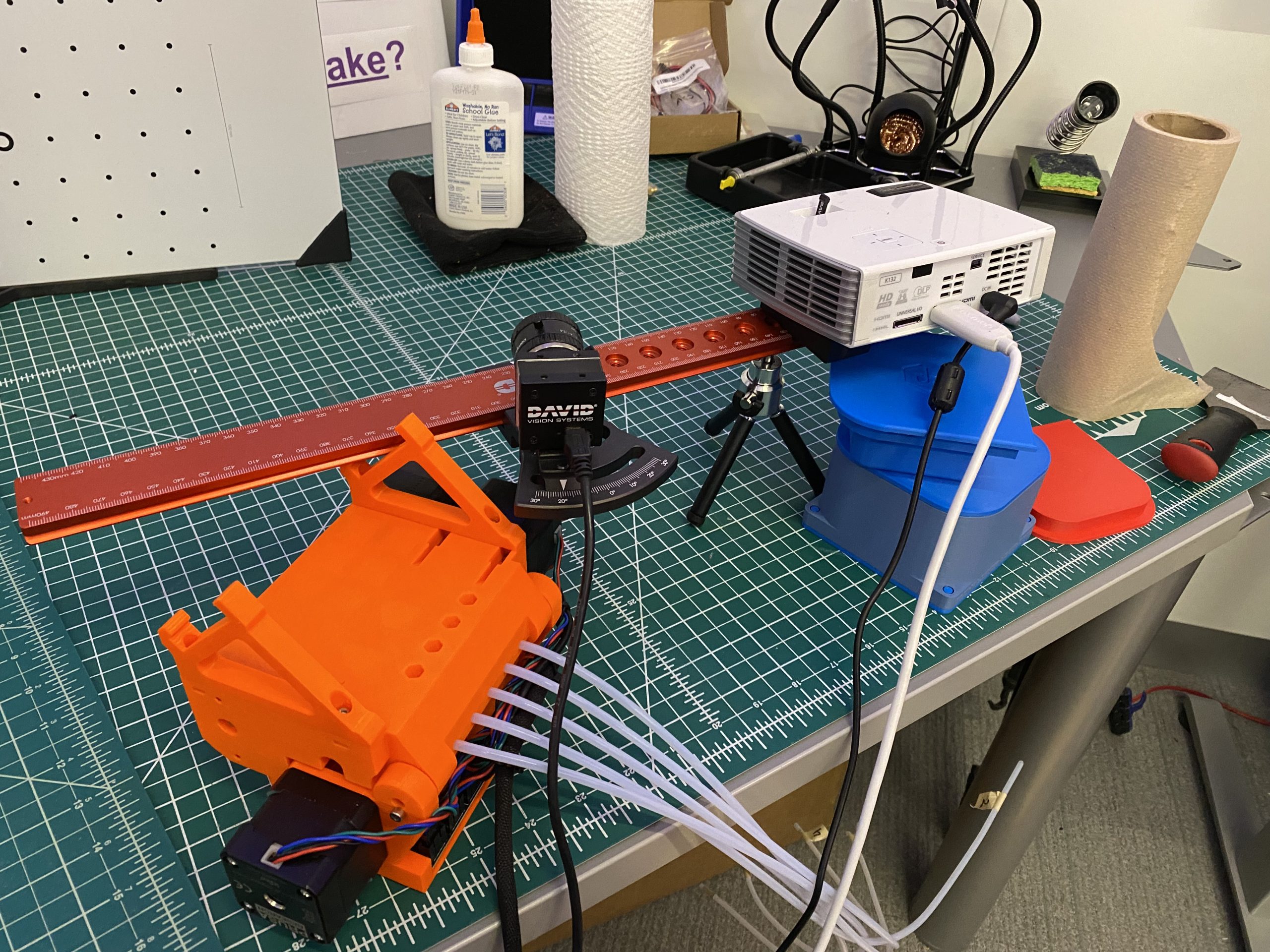
![]() Once your project is accepted, you’ll dive into the creative process with the support of campus experts and access to state-of-the-art tools. From 3D printers and laser cutters to fiber arts tools and microprocessor kits, the Makerspace and Fabrication Lab have everything you need to bring your concept to life. You’ll also have the chance to collaborate with knowledgeable staff and fellow students, making the experience as enriching as it is productive.
Once your project is accepted, you’ll dive into the creative process with the support of campus experts and access to state-of-the-art tools. From 3D printers and laser cutters to fiber arts tools and microprocessor kits, the Makerspace and Fabrication Lab have everything you need to bring your concept to life. You’ll also have the chance to collaborate with knowledgeable staff and fellow students, making the experience as enriching as it is productive.
3. Showcase Your Work
At the end of the semester, your project will take center stage. Whether it’s displayed at an exhibition or shared with the broader campus community, your work will inspire future innovation and creativity. Completing an SYE project isn’t just about the final product, it’s about the process, the lessons learned, and the mark you leave on the Williams community. You also will be offered an opportunity to amplify your work by writing a guest Makerspace blog post.
What You Need to Know
- The SYE accepts up to five projects per semester on a first-come, first-served basis. This ensures each participant receives a personalized, focused experience.
- Selected projects are matched with the expertise available on campus, ensuring the right guidance and resources are at your fingertips.
The application process is intentionally simple, giving you more time to focus on what really matters, creating something meaningful, innovative, and entirely your own. So, if you have an idea that’s been buzzing in your head, now’s the time to turn it into reality. The SYE is your platform; all you need to do is take the first step.
A Network of Campus Partners
The SYE thrives on collaboration, integrating support from campus partners like Alumni Engagement, Career S
ervices, the Zilkha Center, and more than a dozen others. These partnerships enhance the program’s impact, offering students a robust platform to refine their skills and showcase their achievements.
Leadership Behind the SYE
The Senior Year Experience (SYE) at Williams College was initiated under the leadership of Associate Dean Ray Grant, who serves as the Associate Dean for Senior Year Students and Director of Students in Transition. Dean Grant has been instrumental in shap
ing the SYE to provide seniors with meaningful opportunities to celebrate their achievements, explore new interests, and prepare for life after graduation. His dedication to student development ensures that the SYE remains a cornerstone of the senior experience at Williams.
If the SYE had a superhero, it would be Dean Ray Grant: the guy who turned the “senior slump” into a launchpad for creativity and adventure. As the Associate Dean for Senior Year Students, he’s made sure the SYE isn’t just another check-the-box requirement but a once-in-a-lifetime chance to make your mark at Williams. His goal? Help every senior leave with stories, skills, and something awesome to show for their time here.
Why SYE Matters
Beyond creating something tangible, the SYE is about professional growth and personal fulfillment. Imagine presenting a digital portfolio of your project to potential employers, highlighting skills in research, design, and execution. Platforms like Wakelet and Bulb, recommended by the SYE team, provide seamless ways to compile and share these experiences.
Inspiring Creations
The Makerspace has already facilitated awe-inspiring projects, such as:
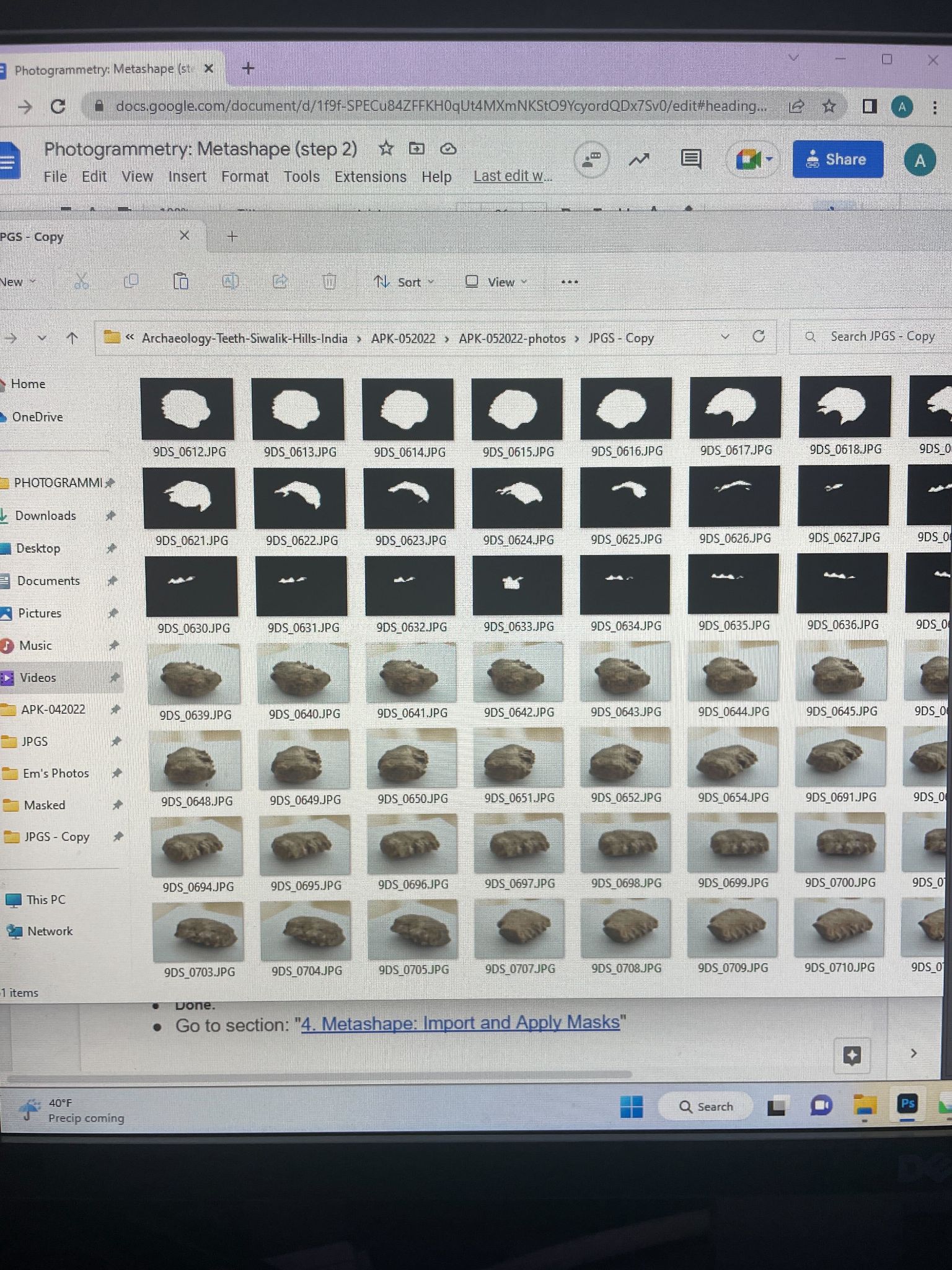
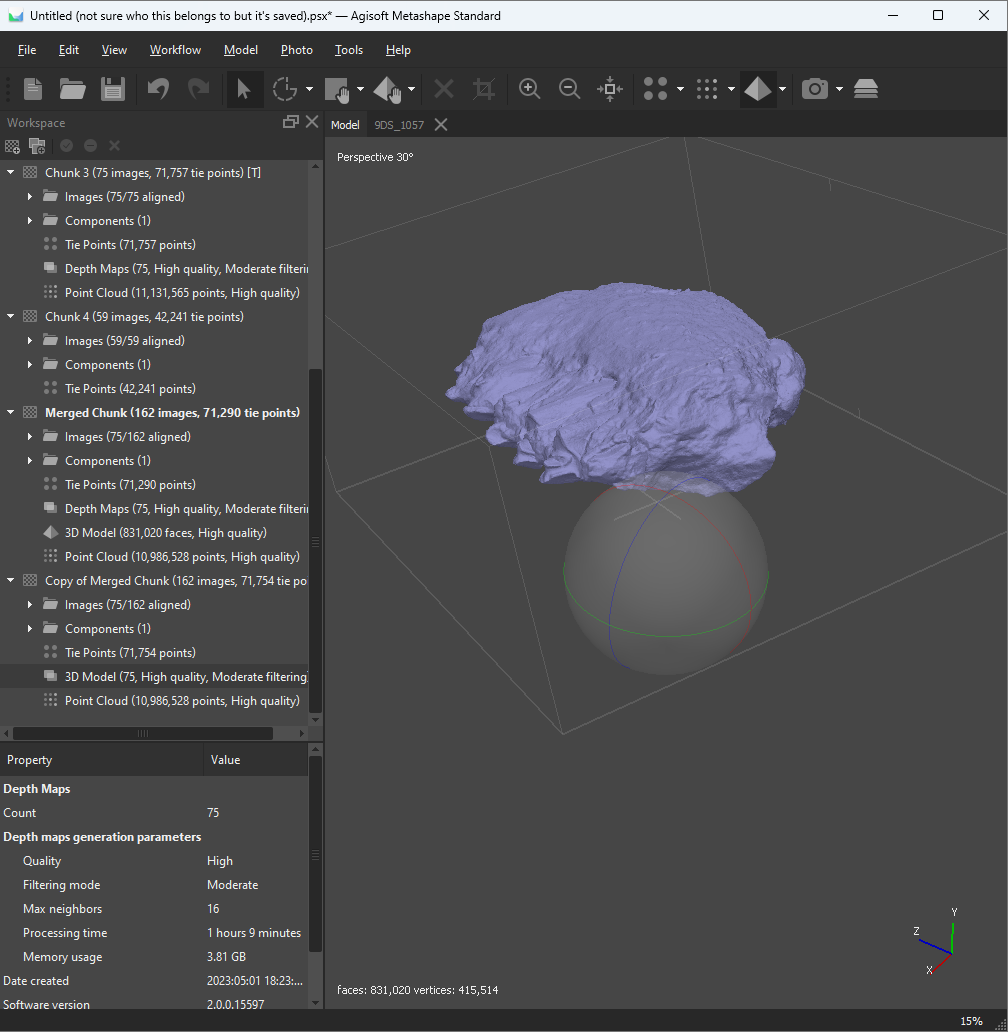
- High resolution 3D photogrammetry scans of million year old Bovid teeth from an archeological site in the Siwalik Hills, India
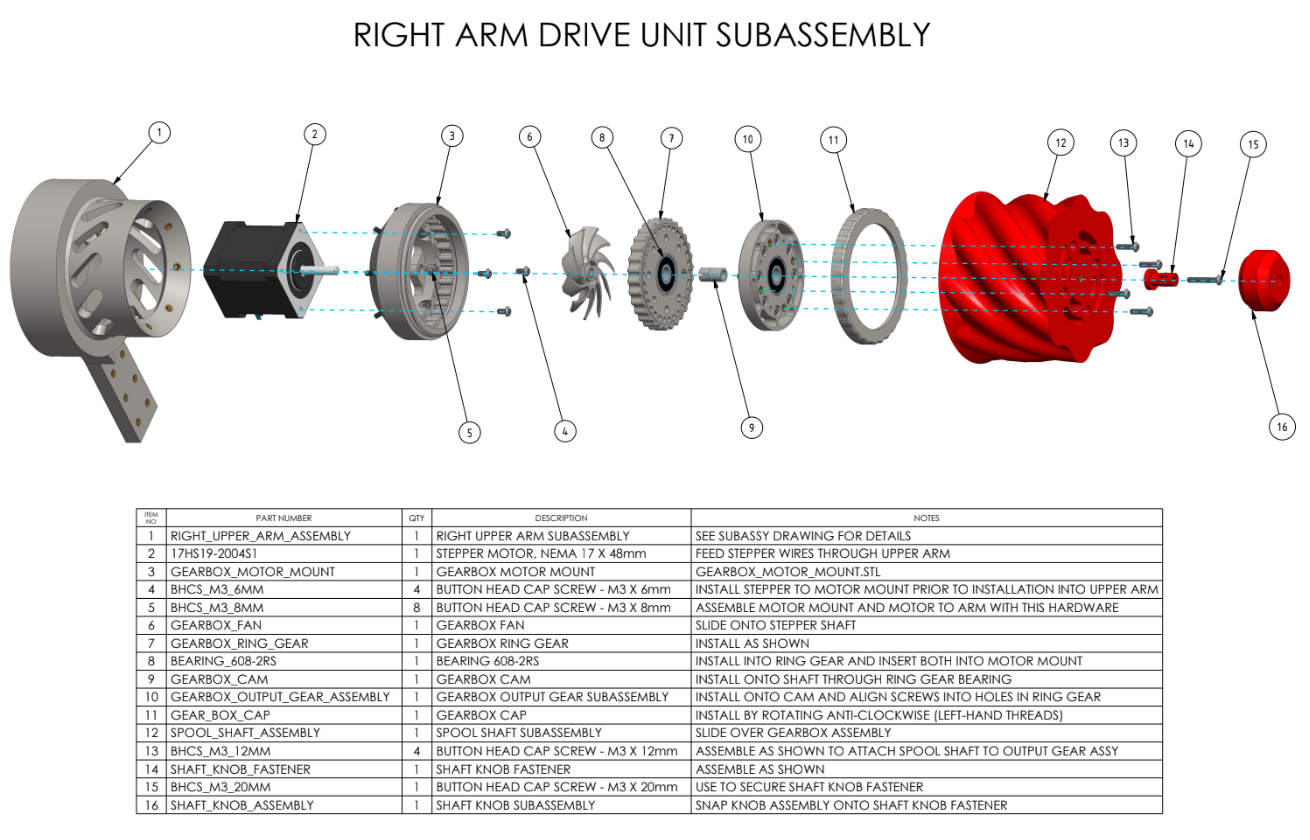
- Extracurricular 3D-printed and painted board games like Catan
- Sustainably harvested Hopkins Forest logs to laser-engraved garden signs for the Zilkha Center
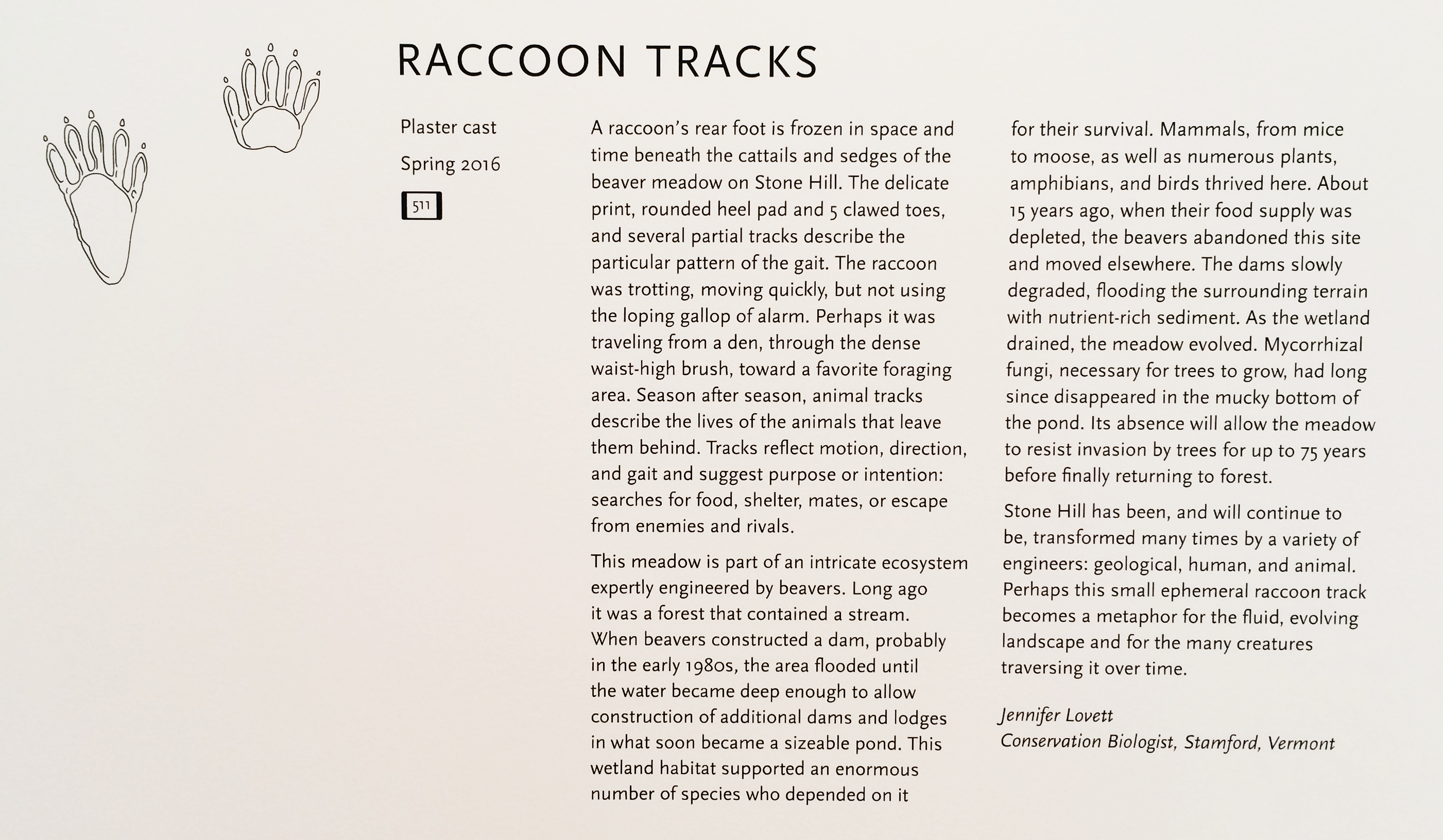
- Museum quality exhibition reproductions such as this Mayan Tenon (“monster” head)
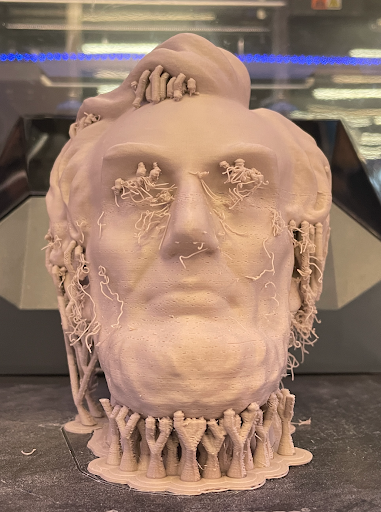
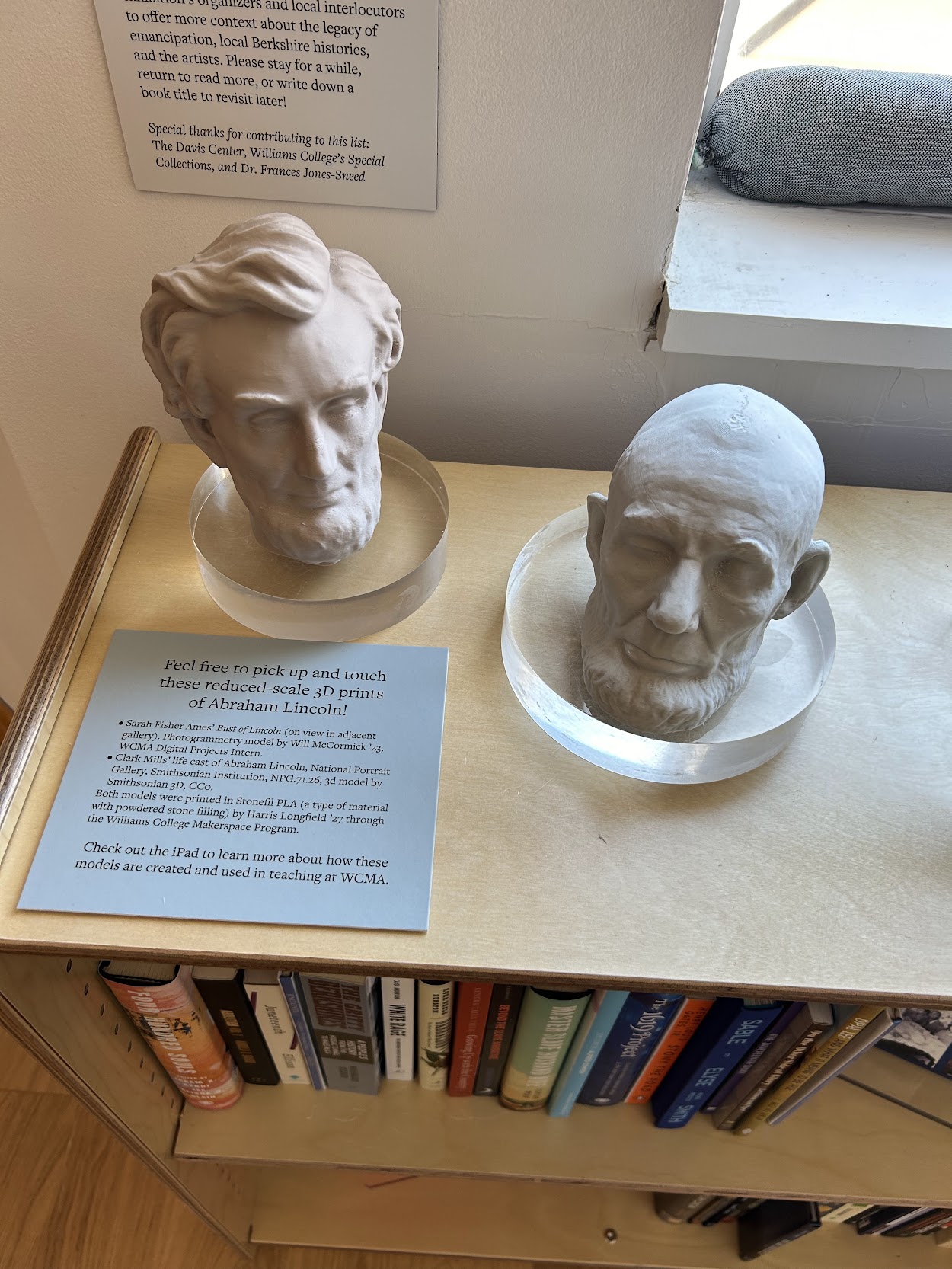
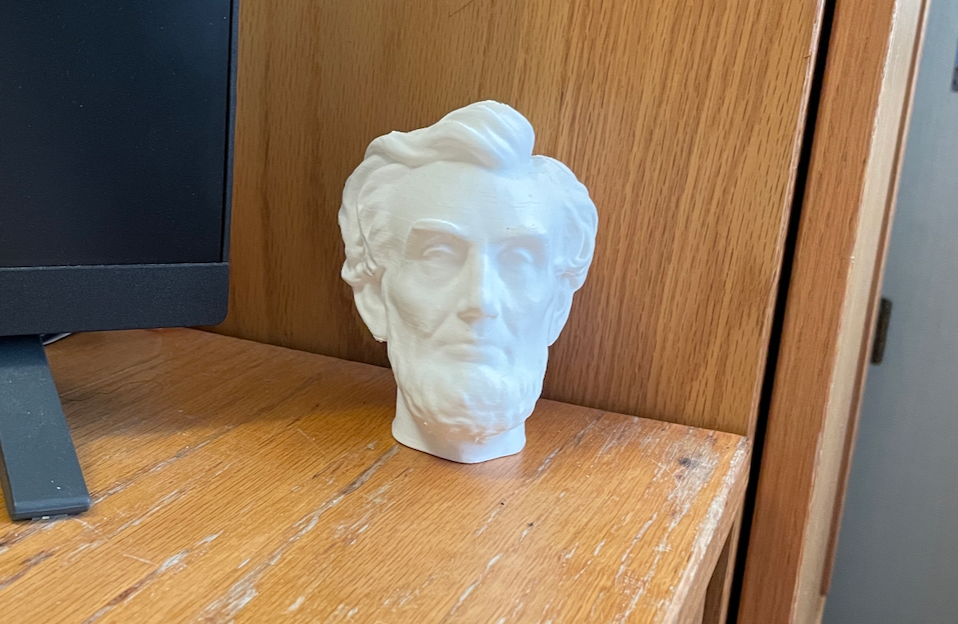
- Lincoln life masks brought to life with 3D modeling
These creations demonstrate the blend of creativity and innovation that the SYE nurtures.
Happy applying!